
今年はシミュレータでの開催となった、ETロボコン2020(https://www.etrobo.jp/)も無事に終わりました。初参加ということもあり、相当に苦戦しましたが、一区切りついたということで記事にしておきます。
スラロームについて
ETロボコンの競技ではライントレースで走行タイムを競う競技と難所を攻略しボーナスタイムを取得する競技があります。
プライマリークラスのコースでは、難所にスラロームと呼ばれる障害物が置かれた板の上を通過する競技があります。板に乗り、配置された障害物を避けて板から降り障害物を避ける際には障害物を倒さず通過すると評価が高くなります。
通常ETロボコンではカラーセンサーを用いて黒いライン上をライントレースで走行しますが、スラロームには障害物がライン上に配置されているためライントレースでは走行することができません。
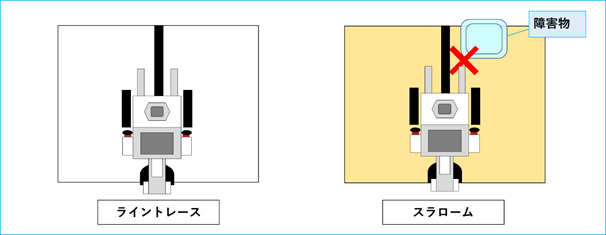
スラロームではラインに頼ることなく、狙った方向・距離を 蛇行させる必要があります。
そこで重要となるのが超音波センサーです。
超音波センサーとは
超音波センサーは、超音波を発信し、その反響音を読み取ることで距離を測定します。
このセンサーを使用することで障害物と自身走行体)の距離を取得しその結果を元に障害物を回避することが可能となります。
障害物を回避するには
それでは超音波センサーを使用した本題である障害物の回避方法について簡単に説明します。
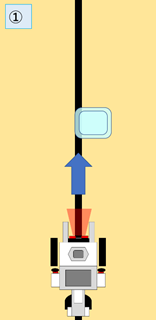
1.障害物に近づく
まずライントレースを使用し障害物に近づきます。その際に超音波センサーを使用し走行体と障害物の距離を計測します。計測した距離を元に目標の距離まで移動します。
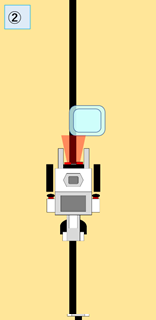
2.障害物を検知する
障害物に近づくと超音波センサーから取得できる障害物との距離が短くなるため目標の距離まで障害物に近づき、目標の距離に到達した場合ライントレースを終了させ走行体を一時停止させます。
※目標の距離は検証を行い調整する必要があります。
3.障害物を避ける
このまま前進すると障害物に衝突してしまうため、障害物に衝突しないように曲がります。
※曲がる角度は検証を行い調整する必要があります。

4.障害物を旋回する
障害物に衝突しないように大きく旋回し障害物を回避します。旋回の終了タイミングは黒ラインを検出するまでにすると障害物を回避した状態で旋回が終了するのでよいと思います。
旋回は障害物に当たらないことも重要ですが、スラロームは板の上で行うため板からはみ出てコースアウトしないように注意する必要があります。

実際のETロボコンのスラロームには複数の障害物が密集しているため簡単には攻略できませんが、上記方法を用いることでスラローム攻略に一歩近づくと思います。
まとめ
- スラロームの対策として使用するのは超音波センサーである。
- 超音波センサーは超音波を発信し、その反響音を読み取ることで距離を測定するセンサーである。
- 障害物を回避するには障害物との距離、障害物を避ける角度、障害物を避けるために旋回する距離を調節することで障害物を回避することができる。