
ETロボコン2021競技規約が発表されました。今年もシミュレータによる競技会となります。昨年はプライマリークラスで参加しましたが初参加ということもあり良い結果は残せませんでしたが、今年のプライマリークラスでもスラロームが採用されているため、今年こそはスラロームの完全攻略を目指そうと思います。そのためスラロームの去年の攻略方法と課題について記事にします。
1.スラロームについておさらい
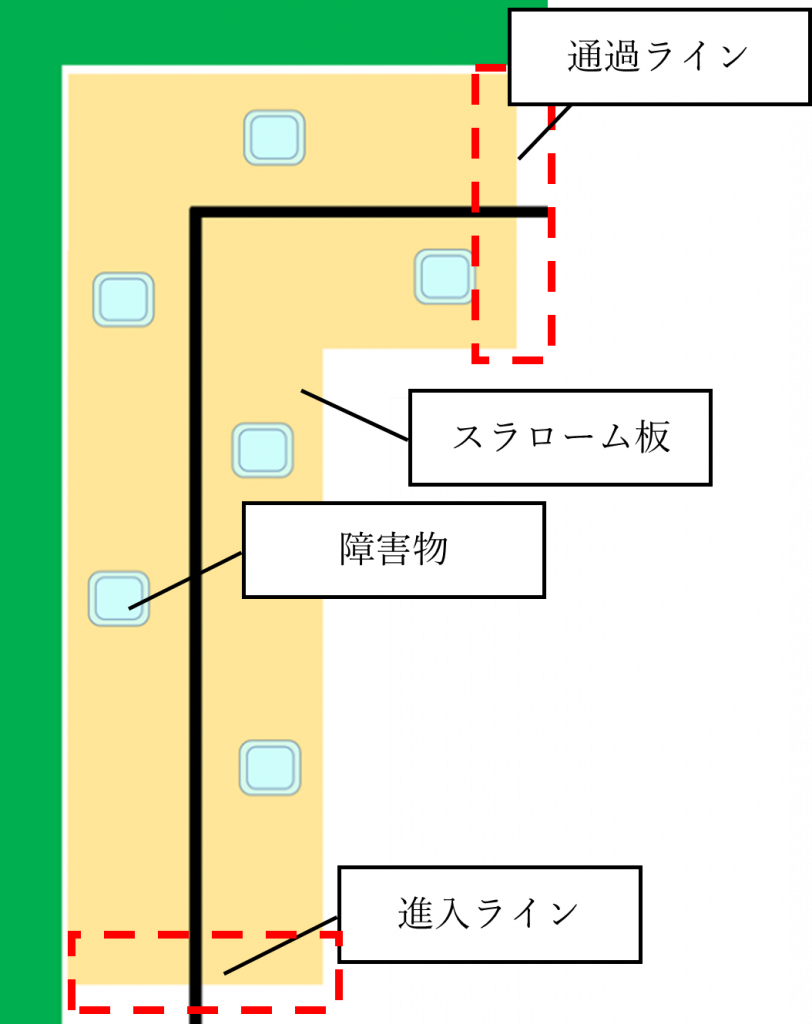
過去の記事でも書きましたがスラロームは走行体が進入ラインからスラローム板に上り、走行体が通過ラインからスラローム板を降りると、スラローム通過となります。このスラロームを通過するときには走行体をコースに接触してはいけません。もちろんコースアウトもできません。障害物の配置パターンは2通りあり、運営側で決めているためこちら側では選ぶことができません。そのためどちらのパターンでも攻略ができるようにする必要があります。
スラローム通過では障害物を回避する必要があり、障害物が転倒せずに残っている数でボーナスタイムを獲得できます。つまりスラロームでは進入ラインから障害物を一つも転倒させず通過ラインまで走行体を通過させることがスラロームの完全攻略となります。
2.障害物回避について
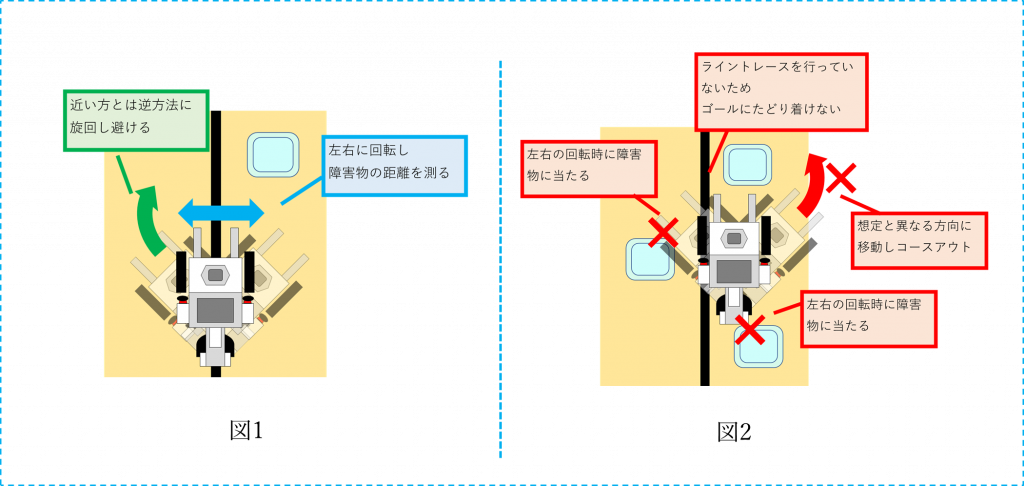
スラロームの障害物を避けるために当初考えていた回避方法は走行体を左右に回転し、超⾳波センサーで障害物との距離を計測し障害物が遠ければ近づき、 近ければ逆方法に旋回し避けるというものでした。(図1参照) この方法では、2個目までは障害物を避けることができますが、それ以降は 避けることができなかったり、コースアウトしたりと 予期せぬ動作が発生してしまうことが分かりました。(図2参照) また、ラインを見失ってしまうことからゴールができなくなってしまいました。そこで、障害物を避けた後に黒ラインを検知することで、 コースアウトおよびラインを見失うリスクを緩和します。
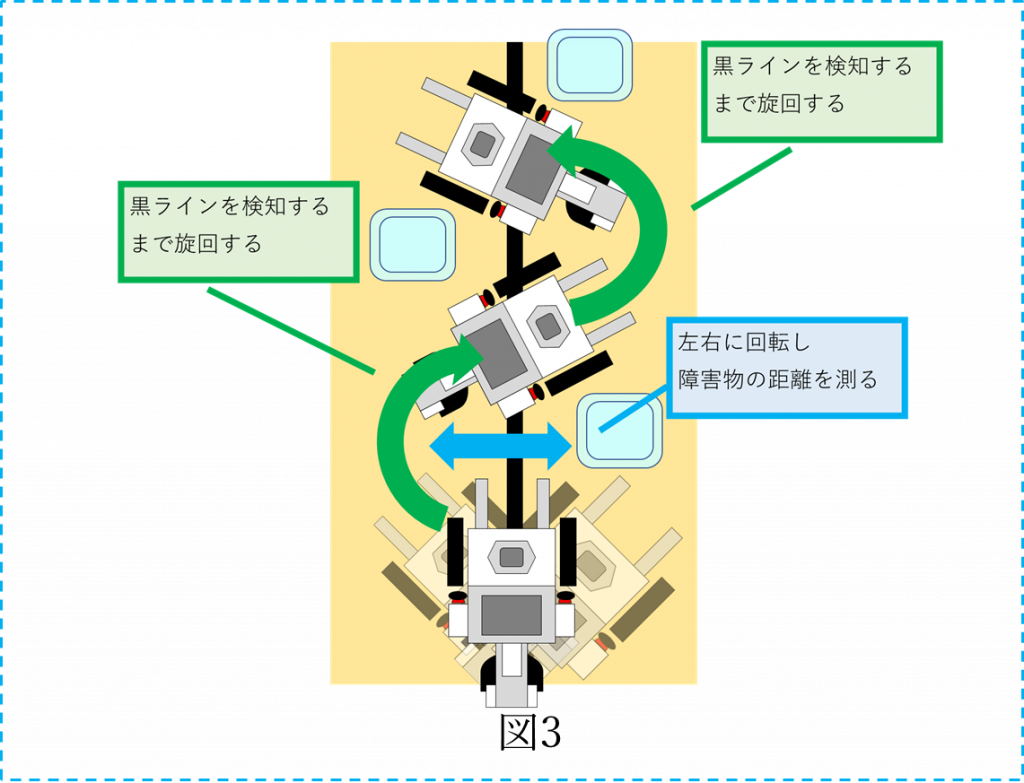
まず、進入ライン通過後、障害物を検知するまで走行体を左右に回転し、 障害物を検知後に左に旋回し黒ラインを検知するまで移動します。黒ラインを検知後は 右に旋回し黒ラインを検知するまで移動させます。(図3参照) これを繰り返すことでラインを見失うことなく、通過ラインまで移動することを可能とします。
上記の動きを分かりやすくフローで記述します。
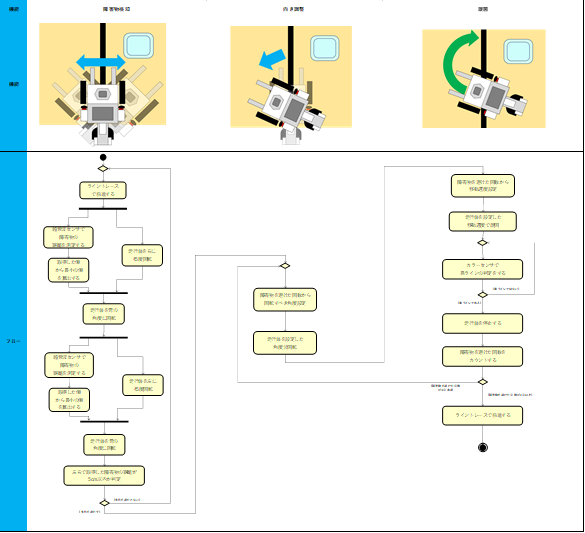
この方法によってラインを見失ったり、コースアウトしたりする確率を下げます。
3.障害物回避走行イメージ
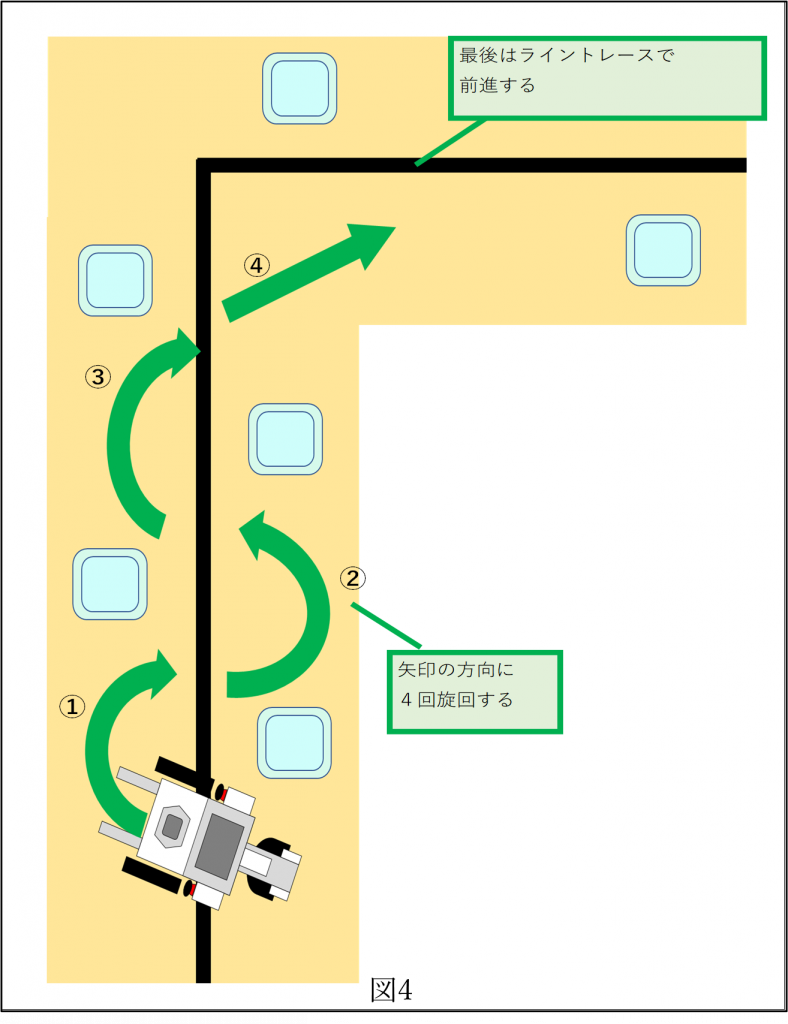
「障害物回避について」で述べた回避方法を組み込むことにより図4のような走行を行うことができます。最初の障害物を検知後に4回の障害物回避(旋回)を行いその後、通過ラインからスラローム板を降りまでライントレースで前進する。各旋回では、向きの調整を行う必要がありそれぞれで異なる角度を設定することでスラロームの成功率を上げます。
4.障害物回避課題
以下現状発生している課題です。
- ・最初の障害物検知(超⾳波センサー)の精度が悪いため改善が必要
- ・障害物回避の旋回での調整がまだまだ甘い
- ・障害物の配置パターンがどのパターンでも攻略できるようにする
先はまだまだ長そうです。
5.終わりに
今回は、去年のETロボコンのスラローム攻略と課題を記事にしました。
課題はまだありますが今年のETロボコンは始まったばかりですので課題を解決し今年こそはスラロームの完全攻略を目指したいと思います!